



May
26
/ 2023
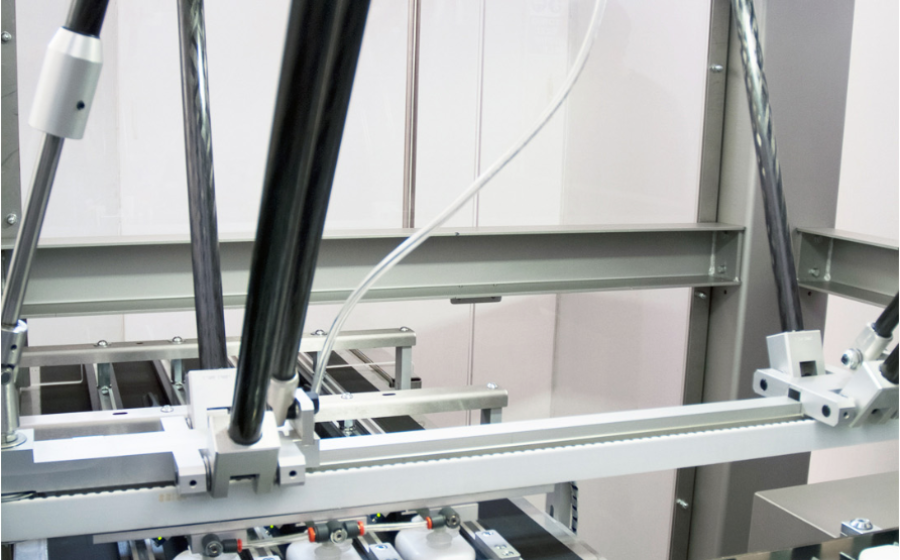
The universal arm joint may be fixed or rotating.
If rotating, the gear motor that controls its motion is fixed to the machine’s upper plate.
The shift in the Y-axis is transmitted by a splined shaft, a ball-bushing, and two universal joints.
Main characteristics of the SP-I:
- Gripping head with the possibility of product rotation by means of universal joints
- Adjustable gripping head rotation speed
- Structure in Ergal and carbon fibre
- Payload up to 20 kg
- Low maintenance cost
- Simplicity of use
- Process flexibility
- Available in 9 versions with different arm dimensions.
Source url
display_title
SP-I – Robot manipulator for continuous motion machine !
Categories
Short Description
CAM proudly presents SP-I, a biaxial delta robot, ideal for feeding continuous motion machines.